
Il nostro progetto
PIERO JONES E L’AMULETO DELLA SFINGE
Questa è la storia di Piero Jones, un paleontologo, appassionato di popoli antichi, che si trova nel deserto dell’Egitto, entra in una piramide e ne combinerà di tutti i colori!
Alla ricerca di un amuleto magico, entra nella piramide e incontra un grande ragno che gli corre incontro, lui si spaventa moltissimo e torna indietro!
Poi va verso una piramide più piccola, in cui vede se stesso entrare, si dirige verso il sarcofago di Tutankhamon, ma prima di arrivarci trova una mummia che gli corre incontro e lo farà morire di spavento.
Una volta che la mummia è tornata indietro, lui continua il suo viaggio di pochi metri verso il sarcofago di Tutankamon in cui spera di trovare l’amuleto magico!
Il sarcofago si apre e esce lo stesso Tutankhamon mummificato che fa prendere un infarto a Piero.
A un certo punto, durante la sua esplorazione, vede qualcosa di affascinante e luccicante che balla con un ritmo armonioso: sono quattro serpenti che ballano in mezzo a cinque lingue di fuoco.
Poi si gira e vede una specie di fiore chiuso che in realtà è un enigma da risolvere!
Lo risolve e mentre il fiore si apre trova l’occhio di Ra.
Si gira e trova un libro magico che ha dentro un draghetto: questo draghetto è l’amuleto magico che tanto cercava!
eve, intensa e ricca di colpi di scena! 😊
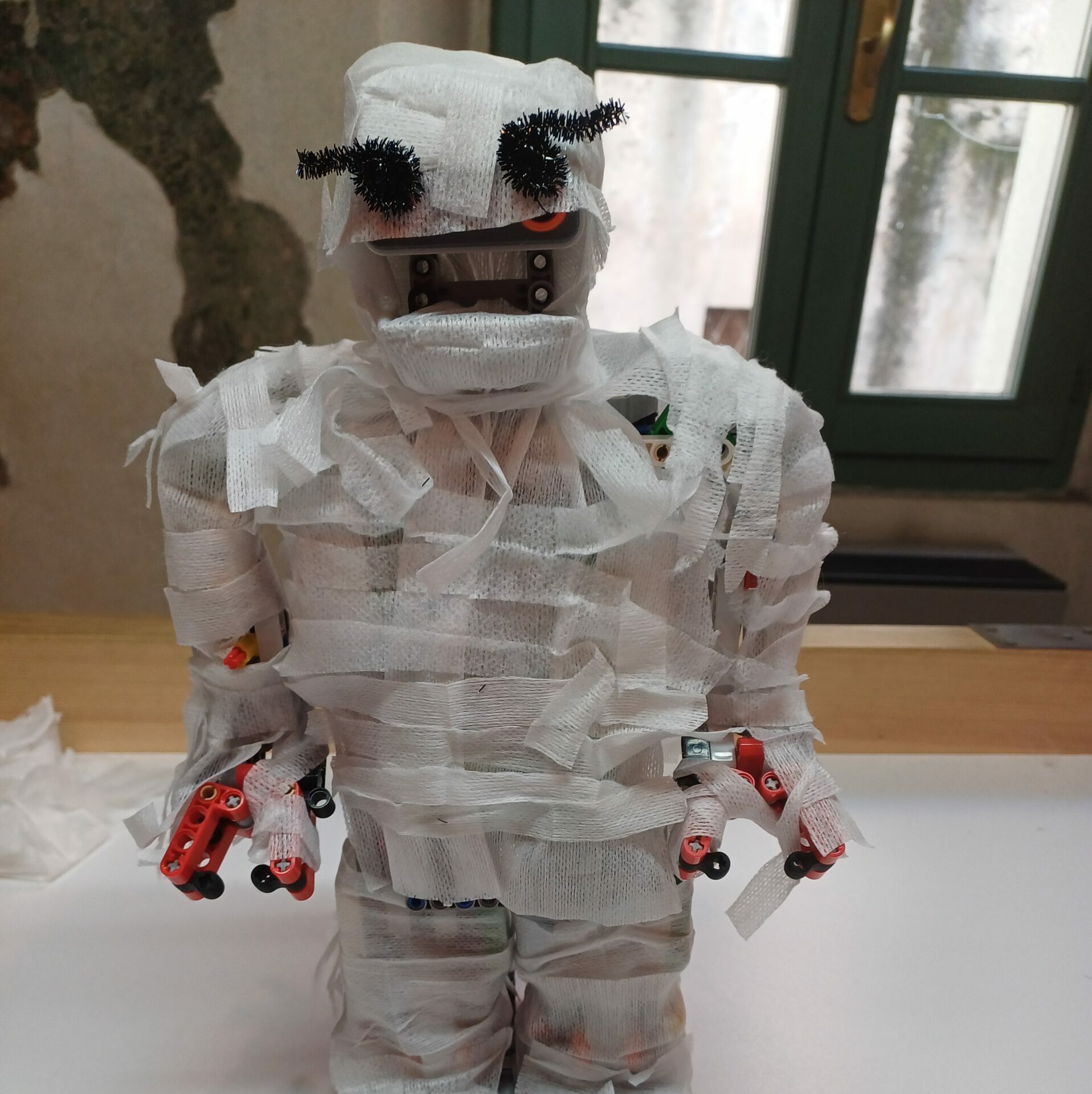
Presentazione robot

- 3 motori grandi spike
- 2 motore piccolo spike
- Spike prime
- sensore di contatto
PROBLEMI AFFRONTATI
- costruzione per ottenere il movimento desiderato
- braccio sinistro si alza e si abbassa
- braccio destro altro movimento
- 2 motori per consentire il movimento
- sensore di contatto per avviare piu facilmente Piero
- stabilità per l’altezza del robot, risolti grazie al posizionamento di un una piattaforma gialla
- ottimizzazione degli spazi all’interno del costume troppo piccolo

- costruzione meccanica complicata
- spike prime
- motore piccolo
- sensore ultrasuoni
PROBLEMI AFFRONTATI
- mettere il fiore in verticale e costruire contrappeso per la stabilità
- creazione di un centro in cui posizionare l’amuleto
- creazione di uno sfondo : sembra semplice ma abbiamo dovuto variare tutte le distanze

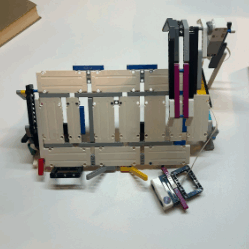
- costruzione con movimento cinetico
- microcontrollore spike prime
- motore medio
- sensore ultrasuoni
PROBLEMI AFFRONTATI
- costruzione delle fiamme e dei serpenti che girano senza incastrarsi
- sistemazione degli ingranaggi e la posizione corretta dei bracci
- trovare gli “oggetti” giusti per far si che non blocchino i movimenti dei serpenti/fiamme
- 3 motori grandi NXT
- cervello NXT
- sensore ad ultrasuoni
- 2 sensori di tocco (non collegati)
PROBLEMI AFFRONTATI
- cavi originali NXT sono troppo spessi e non consentivano i movimenti del robot senza che questo si smontasse.
- abbiamo ricostruito NXT 2 volte perchè abbiamo provato ad inserire lo spazio per consentire utilizzo della batteria al litio- poi però si smontava ancora
- SALVEZZA : cavi cinesi piatti
- programmazione del robot anche se molto semplice deve venire calibrata per consentire lo “sbilanciamento” del robot per favorire il movimento

- 3 motori medi spike
- sensore ad ultrasuoni
- cervello prime hub
PROBLEMI AFFRONTATI
- costruzione con un gear train che consente alzata della mummia e quando è alzato consente di far alzare le braccia che necessita di 2 motori
- meccanismo per apertura del sarcofago
- PCB prefatto con Scheda Arduino Nano
- Sensore di tocco
- Sensori di luminosità
- Led occhi e bocca
- Micro servo
PROBLEMI AFFRONTATI
- la programmazione è fatta con Open Roberta Lab
- complicata la sincronizzazione di Arduino con Open Roberta

- Cervello Prime Hub
- Motore Spike Medium
- Sensore ultrasuoni
PROBLEMI AFFRONTATI
- costruzione raddoppiata con un solo motore grazie ad una catena di ingranaggi

- cervello Wedo2.0
- Motore Wedo 2.0
PROBLEMI AFFRONTATI
- la programmazione con wedo è difficile in quanto non si riesce esattamente a determinare lo spostamento che rischia cosi di fuoriuscire completamente dalla piramide

- cervello Wedo2.0
- Motore Wedo 2.0
PROBLEMI AFFRONTATI
- La costruzione proviene da una scatola lego ma per il movimento abbiamo preso spunto da un video e poi abbiamo cercato di realizzarlo
- ulteriore aggiunta: lo stesso motore agganciato a degli ingranaggi consente lo spostamento nella scenetta

- EV3
- sensore di tocco per attivare il robot
- sensore ultrasuoni per gli occhi
- 1 motore per muovere le ali
- ali stampate in 3D
PROBLEMI AFFRONTATI
- costruzione per ottenere il movimento desiderato con velocità diverse
- sensore ad ultrasuoni non utilizzato per attivazione per rischio di attivazione indesiderata
Costruzione del leggio su cui poggia un libro che aprendosi scopre il dragh hoetto
con meccanismo di apertura libro
PROBLEMI AFFRONTATI
Nessuno
Video Dimostrativo
Poster
🔍 Trama:
Il team ha ricreato la storia di Piero Jones, un esploratore alla ricerca del magico Amuleto della Sfinge, usando robot autonomi che:
– Risolvono enigmi meccanici
– Interagiscono con scenografie animate (serpenti, scorpioni)
– Comunicano tra loro tramite sensori
👥 Team:
Gabriel, Giacomo, Pietro P., Pietro S., Giorgio
⚙️ Tecnologie:
LEGO WeDo 2.0, SPIKE Prime, NXT, Arduino Nano
